Summary
- How to steer (or teach) an active machine learner that queries labels sequentially?
- We formulate the teaching problem as a Markov decision process, with label choice as action.
- A teacher teaching with inconsistent labels can beat consistent labels.
- We further endow the learner with a model of the teacher.
- And apply this towards modelling strategic user behaviour in interactive intelligent systems.
Illustrative example
The figure shows an example of teaching effect on pool-based logistic regression active learner. The left-panel shows a pool of labelled data (dots and crosses) and a logistic regression decision boundary fit to the full pool (black line). The middle panel shows how an active learner, using uncertainty sampling to query labels for points in the data pool, fails to sample useful points in 10 iterations to learn a good decision boundary (starting from blue training data). As shown in the right panel, a planning teacher can steer the learner to sample more representative points by switching some labels (switched labels are shown in red).
Modelling strategic user behaviour in human-computer interaction
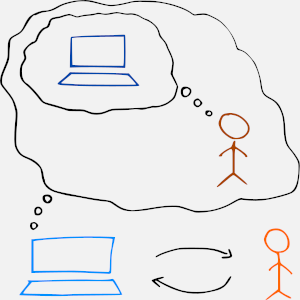
We apply the teacher model towards modelling active planning behaviour of users of interactive intelligent systems, such as recommendation systems. The figure on the right illustrates this: In the interaction between the system and a user, the system has a model of the user having a model of the system. The nested model of the user is that of a teacher, trying to steer the system towards her goals, using her mental model of the system. Thus, in inferring the intent in the the user’s actions, the system interprets them as actively planned behaviour (“teaching”). Since the teacher model is a Markov decision process, the problem of inferring user’s intent can be solved through inverse reinforcement learning.
Abstract
Machine teaching addresses the problem of finding the best training data that can guide a learning algorithm to a target model with minimal effort. In conventional settings, a teacher provides data that are consistent with the true data distribution. However, for sequential learners which actively choose their queries, such as multi-armed bandits and active learners, the teacher can only provide responses to the learner’s queries, not design the full data. In this setting, consistent teachers can be sub-optimal for finite horizons. We formulate this sequential teaching problem, which current techniques in machine teaching do not address, as a Markov decision process, with the dynamics nesting a model of the learner and the actions being the teacher’s responses. Furthermore, we address the complementary problem of learning from a teacher that plans: to recognise the teaching intent of the responses, the learner is endowed with a model of the teacher. We test the formulation with multi-armed bandit learners in simulated experiments and a user study. The results show that learning is improved by (i) planning teaching and (ii) the learner having a model of the teacher. The approach gives tools to taking into account strategic (planning) behaviour of users of interactive intelligent systems, such as recommendation engines, by considering them as boundedly optimal teachers.
Reference
Tomi Peltola, Mustafa Mert Çelikok, Pedram Daee, Samuel Kaski
Machine Teaching of Active Sequential Learners
NeurIPS 2019
An earlier version of the paper, titled Modelling User’s Theory of AI’s Mind in Interactive Intelligent Systems, with a larger focus on human-computer interaction and user modelling is available as version 2 on arXiv.
Contact
- Tomi Peltola, tomi.peltola@aalto.fi
- Mustafa Mert Çelikok, mustafa.celikok@aalto.fi
- Pedram Daee, pedram.daee@aalto.fi
- Samuel Kaski, samuel.kaski@aalto.fi
Work done in the Probabilistic Machine Learning research group at Aalto University. The research group is a part of Finnish Center for Artificial Intelligence (FCAI) and Helsinki Institute for Information Technology (HIIT).
Acknowledgments
This work was financially supported by the Academy of Finland (Flagship programme: Finnish Center for Artificial Intelligence, FCAI; grants 319264, 313195, 305780, 292334). M. Mert Çelikok is partially funded by the KAUTE foundation. We acknowledge the computational resources provided by the Aalto Science-IT Project. We thank Antti Oulasvirta and Marta Soare for comments that improved the article.